Polycopié du cours (par Laurent Koelblen, Patrick Polo et Vincent Humilière)
Avancement du cours
Cours 1
Notion de corps et d'espace vectoriel sur un corps (le cas $k=\mathbb{R}$ est le plus important).
Applications linéaires
Sous-espace vectoriel, sous-espace engendré par une famille finie, notation $\textrm{Vect}$.
Famille libre, génératrice, base, coordonnées.
Espace de dimension finie, notion de dimension d'un espace vectoriel (preuve que la dimension est bien définie).
Théorème du rang, avec preuve.
Matrice d'une application linéaires dans des bases, en insistant sur le fait qu'un espace vectoriel n'a en général pas de base canonique
Formules de changement de bases pour les applications linéaires et les endomorphismes.
Cours 2
Fin de rappels d'algèbre linéaire: somme de sous-espaces vectoriels, somme directe, supplémentaire d'un sous-espace, transposée d'une matrice.
Espace dual : définition, base dual.
Application duale, matrice transposée comme matrice de l'application duale
Orthogonal, ensemble des zéros communs pour un sous-espace d'applications linéaires, interprétation du dual comme “espace des équations”
Cours 3
Opérations sur les lignes et les colonnes. Lien avec la dualité.
Sous-espaces affines d'un espace vectoriel.
Sous-espaces affines définis par un système linéaire non homogène
Cours 4
Repères affines et cartésiens.
Intersection de sous-espaces affines.
Espace affine engendré et calcul de la dimension.
Cours 5
Coordonnées dans un repère affine/cartésien.
Applications affines : version abstraite et expression matricielle.
Symétries et projections.
Barycentres
Rappels sur les permutations : transpositions, cycles, longueur des cycles, énoncé du théorème de la composition en cycle (sans preuve), définition de la signature (à partir de la décomposition en cycles).
Cours 6
Déterminant d'une matrice $n \times n$: cohérence avec les cas $2 \times 2$ et $3 \times 3$
Applications multi-linéaires alternées: définition et exemple du déterminant
Déterminant par rapport à une base fixée
L'espace vectoriels des $n$-formes alternées est de dimension $1$.
Le déterminant d'une matrice est multiplicatif.
Cours 7
Une matrice carrée est inversible si et seulement son déterminant est non nul.
Calcul de déterminant d'une matrice diagonale et d'une matrice à blocs triangulaire supérieure.
Critères de diagonalisabilité simples: polynôme caractéristique scindé à racines simples, sommes des espaces caractéristique égale à la dimension de l'espace.
Division de polynômes.
Multiplicité algébrique et géométrique.
Cours 9
Critères de diagonalisabilité simples: une matrice est diagonalisable sur $k$ si et seulement si le polynôme caractéristique est scindé sur $k$ et, pour tout valeur propre, la multiplicité algébrique
est égale à la multiplicité géométrique
Les coefficients du polynôme caractéristique: trace et déterminant
Exemple: diagonalisabilité des matrice $2 \times 2$ sur $\mathbb{R}$ et sur $\mathbb{C}$
Un matrice est trigonalisable sur $k$ si et seulement si le polynôme caractéristique est scindé sur $k$.
Cours 10
Théorème de Hamilton-Cayley
Compléments sur les polynômes : tout idéal de $k[x]$ est principal et théorème de Bezout
Polynôme minimal d'un endomorphisme
Une matrice est diagonalisable si et seulement si son polynôme minimal est scindé à racines simples
Si un polynôme scindé à racines simples annule une matrice $A$, alors $A$ est diagonalisable.
Cours 11
Décomposition en espaces caractéristiques
Propriétés des applications nilpotentes et qui commutent
Décomposition de Dunford
Cours 12
Forme de Jordan d'une matrice nilpotente
Forme de Jordan d'une matrice avec polynôme scindé
Classification affine des coniques : parabole et hyperbole
Exemple
Définition formelle de parabole, hyperbole et ellipse.
Riemann Surfaces
Lecture 1
Definition of a Riemann surface ([Forster, 1.1-1.5])
Examples: projective line ([Forster, 1.5.c]), elliptic curves ([Forster, 1.5.d])
Structure of Riemann surface on a smooth place algebraic curve and its compactifications in the projective plane.
Lecture 2
Definition of holomorphic and meromorphic functions on a Riemann Surface, and basic properties ([Forster, 1.6-1.16])
Elementary properties of Holomorphic mappings ([Forster, 2.1-2.11])
Examples: meromorphic functions on the projective line are rational, coordinate functions on algebraic curves as meromorphic functions on the compactification
Lecture 3
Branched and unbrached coverings ([Forster, 4.11, 4.20-4.26])
Examples: computation of multiplicity of points of a coordinate function on an algebraic curve
Lecture 4
Elliptic functions ([Silverman, Chapter VI, §2 and §3 up to Theorem 3.5])
Weierstrass' $\wp$ and $\wp'$.
Lecture 5
Projective embedding of an elliptic curve ([Silverman, Chapter VI, Proposition 3.6])
Elliptic functions are rational combinations of $\wp$ and $\wp'$ ([Silverman, Chapter VI, Theorem 3.5])
Summation formula for $\wp$
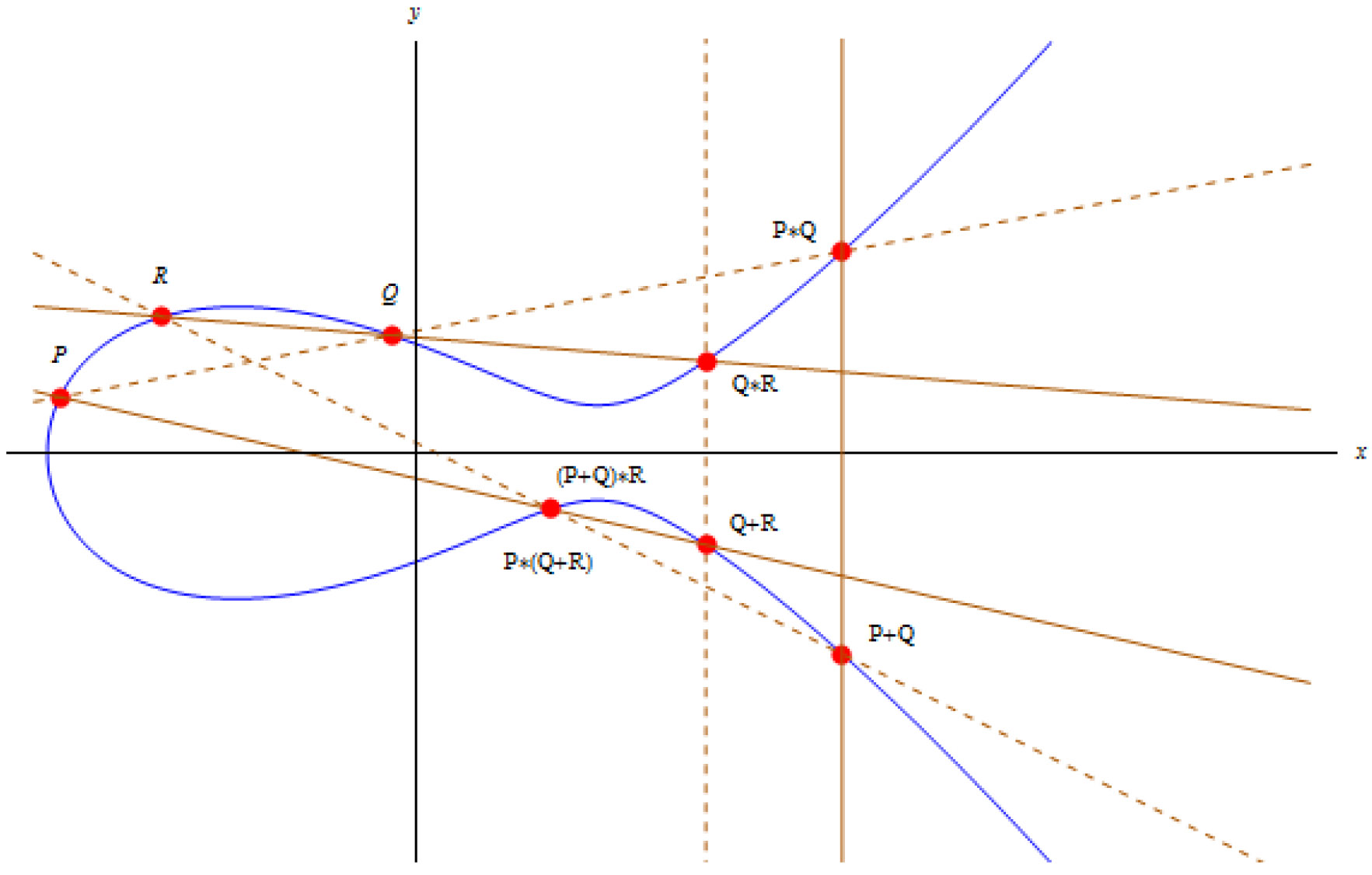
On an elliptic curve, the sum of three points is zero iff they lie on the same line
Proof of the associativity of the group defined in the latter way (see figure)
Lecture 6
Group morphisms between elliptic curves ([Silverman, Chapter VI, § 4])
The set of equivalences classes of elliptic curves ([Serre, Chapter VII, § 2.2])
Action of $\textrm{SL}_2(\mathbb{Z})$ on the upper half plane ([Serre, Chapter VII, § 1])
The Eisenstein series are modular forms of weight $2k$ ([Serre, Chapter VII, § 2.3]).
The $j$-invariant of an elliptic curve ([Serre, Chapter VII, § 3.3]).
Complex structure on the quotient of a Riemann surface by a properly discontinuous action. (Except the proof of Riemann's Mapping Theorem) ([Bergeron et Guilloux, Chapitre IV, § 1])
The action of $z \mapsto z+1$
The action of $z \mapsto -1/z$
Lecture 7
Formula for the order of vanishing of a modular form of weight $2k$. ([Serre, Chapter VII, Theorem 3])
The $j$-invariant is a biholomorpshim $\mathbb{H}/\textrm{SL}_2(\mathbb{Z}) \stackrel{\sim}{\rightarrow} \mathbb{C}$ ([Serre, Chapter VII, § 3.3])
Topology on $\mathbb{H} \cap \mathbb{P}^1(\mathbb{Q})$ and compactification of $\mathbb{H}/\textrm{SL}_2(\mathbb{Z})$ by $(\mathbb{H} \cap \mathbb{P}^1(\mathbb{Q}))/\textrm{SL}_2(\mathbb{Z})$
([Milne, p. 35-37])
The modular curves $Y(\Gamma) = \mathbb{H}/\Gamma$ and $X(\Gamma) = (\mathbb{H} \cap \mathbb{P}^1(\mathbb{Q}))/\Gamma$ for a finite index subgroup $\Gamma \subseteq \textrm{SL}_2(\mathbb{Z})$
The group $\Gamma(N) = \left\{ g \in \textrm{SL}_2(\mathbb{Z}) : g \equiv \textrm{id} \pmod{N}\right\}$ and modular interpretation of $Y(N) = Y(\Gamma(N))$ ([Milne, Lemma 8.7, p. 100])
The cross-ratio of the 2-torsion points on an elliptic curve gives a biholomorphism $Y(2) \stackrel{\sim}{\rightarrow} \mathbb{C} \smallsetminus \{ 0, 1\}$
The Legendre family of elliptic curves on $Y(2)$ and degenerations
Proof of Riemann's Mapping Theorem. The proof given in the lecture is this one.
A constructive approach (based on the solution of Dirichlet problem for harmonic functions) is sketched in the Wikipedia page.
Riemann's Mapping Theorem is implicitly used in cartography. Look for instance at the Peirce Quincucial Projection here.
How is Riemann's Mapping Theorem applied?
M.C. Escher, Angels and devils.
Lecture 8
Holomorphic and meromorphic differential forms on a Riemann Surface
Differential forms on $\mathbb{C}$, $\mathbb{P}^1(\mathbb{C})$
Invariant differential forms on an elliptic curve
Differential forms $dx$, $dy$ on a plane algebraic curve: computations of orders at infinity
Modular functions as differential forms (of order $k$) on $\mathbb{H}/\mathrm{SL}_2(\mathbb{\mathbb{Z}})$
Differential forms on a hyper-ellptic curve
Lecture 9
Divisors: divisor of a meromorphic function, of a meromorphic differential form
Degree of a divisor, linear equivalence, Picard group